Vägen till marinens första sjömålsrobot
Vägen till Robot 08, svenska marinens första operativa sjömålsrobot är en historia med väldigt tvära kast och en historia där huvudpersonen kommer in sent och överraskande från sidan. Det är också en historia om en dragkamp, om begränsade resurser och om militära prioriteringar mellan å ena sidan den gamla ordningen, representerad av den svenska Marinen, och den nya tiden i form av det svenska flygvapnet.
Här börjar vi från början, för att i de två följande texterna gå in på Robot 08:s operativa historia och därefter ge en internationell översikt.
Sjömålrobotar har ända sedan de introducerades skapat rubriker och flera gånger visat på överraskande resultat och gett amiraler världen över dålig sömn och gråa hår. I närtid är det framför allt sänkningen av den ryska robotkryssaren Moskva i Svarta havet 2022 som fått stort genomslag. Det har analyserats och kommer att analyseras flera år framåt. Det är ett vapen som ger den svagare parten ett potentiellt äss i rockärmen och som underskattas på egen risk. Det är också ett vapen som på sätt och vis har en ännu längre historia än man kan tro.
Under 1800-talets andra hälft utvecklades både pansar och artilleri. Bepansrade artillerifartyg kom både att dominera haven och det strategiska och taktiska tänkandet. Sverige och andra mindre sjönationer fick anpassa konceptet till sina förhållanden och för svensk del innebar det att man fokuserade på fartyg som kunde manövrera i och dra nytta av den svenska skärgården. Det innebar att inga slagskepp kom på tal, utan deras funktion ersattes delvis av mindre och mer grundgående s.k. pansarskepp tillsammans med enstaka kryssare. Internationellt så var pansarskeppen svåra att klassificera och betraktades antingen som väldigt tungt bepansrade och beväpnade pansarkryssare eller mer nedlåtande med termen fickslagskepp (Pocket battleship). Sverige och andra länder med mindre flottor och stora skärgårdsområden intresserade sig därför mycket för den självgående torpeden och den möjlighet den gav för mindre fartyg, ubåtar och även snabba motorbåtar att slå hårt mot och även hota de mäktiga slagskeppen. På sätt och vis var torpeden föregångaren till sjömålsroboten. Drivkrafterna bakom utvecklingen av torpeden var att vapnet gav en möjlighet för mindre fartyg att mäta sig med större och tyngre bestyckade fartyg och för en relativt blygsam summa kunna sänka de dyrbara slagskeppen och kryssarna. När tyskarna under andra världskriget började använda flygburna radiostyrda glidbomber mot allierade fartyg var steget inte långt till tanken på styrbara ”flygande torpeder”.
Lufttorpeder
År 1944 inledde svenska marinen och armén ett samarbete för att studera möjligheten att ta fram det man kallade ”lufttorpeder”. Tanken var att ta fram ett vapen som skulle fylla rollen i vad som idag skulle kallas sjömålsrobot, avfyrad både från land och fartyg, samt markrobot som skulle användas mot markmål. Det var Torpedbyrån inom marinförvaltningen som tillsammans med Arméns vapenavdelning som påbörjade arbetet. Samtidigt pågick arbete inom flygvapnet på ett liknande vapen som skulle ersätta flygplansburna torpeder. Sverige hade fått viss kunskap om de tyska robotarna efter att sex stycken V1-bomber kraschat i Sverige vid skjutprovningar från tyska kusten. Dessutom hade en mer avancerad V2-robot kraschat i Bäckebo den 13 juni 1944 och blev känd under namnet ”bäckebotorpeden” vilket gav Sverige möjlighet att studera de tyska vapnen.
En detalj som gör Bäckebotorpeden extra intressant i sammanhanget var att roboten var försedd med radioutrustning för att kunna fjärrstyra vapnet. Vanliga V2 raketer eller robotar hade ett inbyggt tröghetsnavigeringssystem som ställdes in före start och sedan styrde roboten mot målet. Sannolikt rörde det sig om en testrobot för projektet Wasserfall.
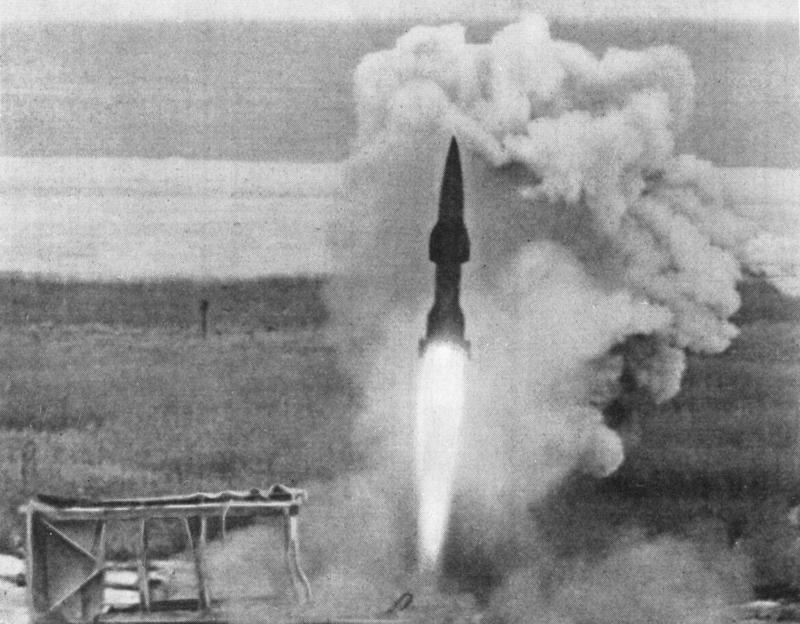
En testrobot av typ Wasserfall avfyras från testanläggningen Peenemunde, hösten 1944. Bildkälla: Bundesarchiv, Bild 141-1898 / CC-BY-SA 3.0
År 1941 påbörjades ett projekt vid den tyska testanläggningen Peenemunde (där man utvecklade såväl V1 som V2) som syftade till att skapa en radiostyrd luftvärnsrobot. Projektet gick under beteckningen Wasserfall och under andra världskriget togs flera prototyper fram. Wasserfallroboten var en nedskalad V2, så Bäckebotorpeden var således inte en Wasserfall utan en V2 som försetts med Wasserfalls styrsystem för utprovning. Även om tyskarna med tiden förfinade själva roboten lyckades de inte innan krigets slut få fram ett fungerande vapen. Det som saknades var ett system för att få roboten att träffa sitt mål eller detonera i närheten. Det var omöjligt för en operatör på marken att se hur nära roboten var sitt mål flera tusen meter upp i luften, särskilt om målet befann sig rakt ovanför. Tyskarna lyckades inte utveckla ett fungerande zonrör, en anordning som känner av om ett flygplan eller annat mål är i närheten och detonerar automatiskt, och de lyckades heller inte få fram en fungerande metod för att leda in roboten med radar.
Vraket av Bäckebotorpeden gav emellertid Sverige en möjlighet att studera den allra senaste tyska vapenteknologin och gav viktig kunskap. Därefter skickades materialet med flyg till Storbritannien som därför fick möjlighet att studera det tyska vapnet och förstå deras kapacitet redan innan den första insatsen av V2-vapen mot Storbritannien i september 1944.
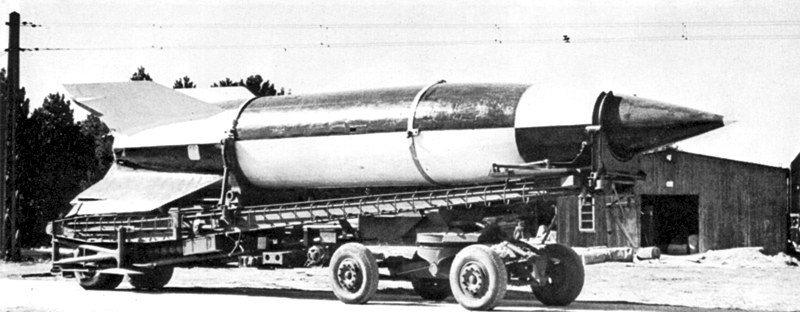
V2 på transportvagn: Foto Imperial War Museum
SAAB börjar och Robotbyrån tar över
År 1945 for en delegation på studiebesök i Storbritannien, som vid krigsslutet samlat på sig ett omfattande material om de tyska robotvapnen. Torpedbyrån beställde därefter ett antal prototyper till lufttorpeder från SAAB. De levererades 1946 och proven kunde börja på allvar. Man utgick från V1, som var den enklare roboten och bedömdes som billigare. Redan från början konstruerades ett mer avancerat styr- och gyrosystem än det som användes i V1:an.
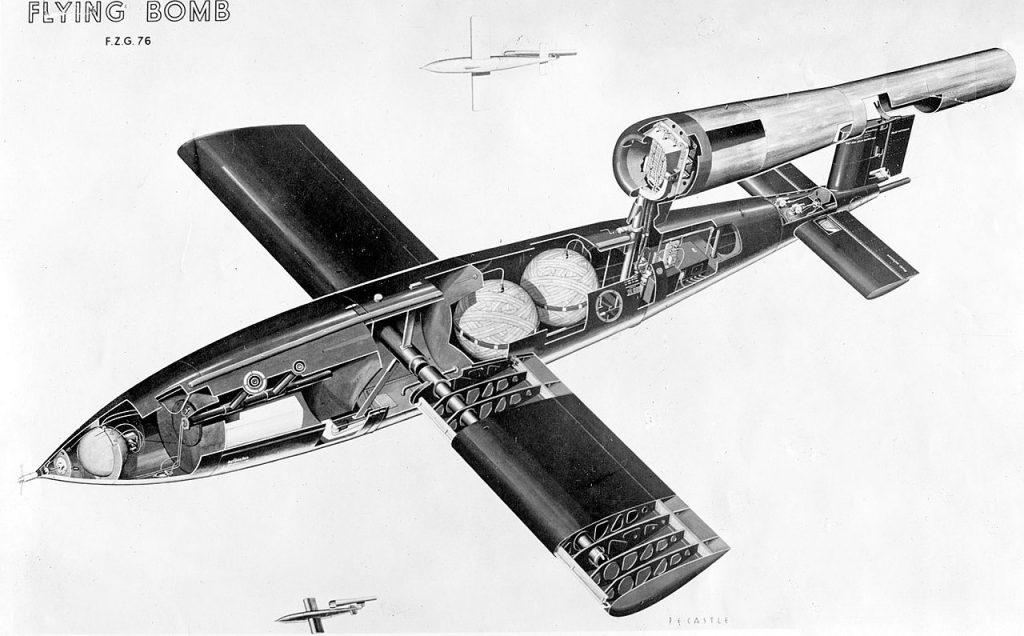
En V1:a i genomskärning som visar konstruktionen. Bildkälla: US Air Force
Den första modellen kallades Robot 310 med vilken man testade styrsystem och framdrivningssystem. Den följdes år 1948 av Robot 311 som var en något större version av 310 men som utrustats för att kunna förses med radarmålsökare och radarhöjdhållare. Det kom emellertid aldrig någon form av radarutrustning för 311 så roboten användes i stor för samma tester som Rb 310.
Med tiden togs projektet över av Kungliga Flygförvaltningens Robotbyrå och Centrala Flygverkstaden i Arboga tog över tillverkningen av försökrobotarna. Flygvapnet utvecklade också robotar, så att föra samman projekten under en huvudman var logiskt. Under 1950-talet följdes Rb 311 av Robot 315 som kom att testas även från jagarna Halland och Småland som var tänkta att utrustas med vapnet. Det var fortfarande problem med att få fram både radarmålsökare och radarhöjdhållare så tills vidare styrdes robotarna med radio och med ett förprogrammerat räkneverk. Men på det stora hela började man ändå närma sig ett färdigt vapen och under 50-talet tillverkades 193 stycken Robot 315.
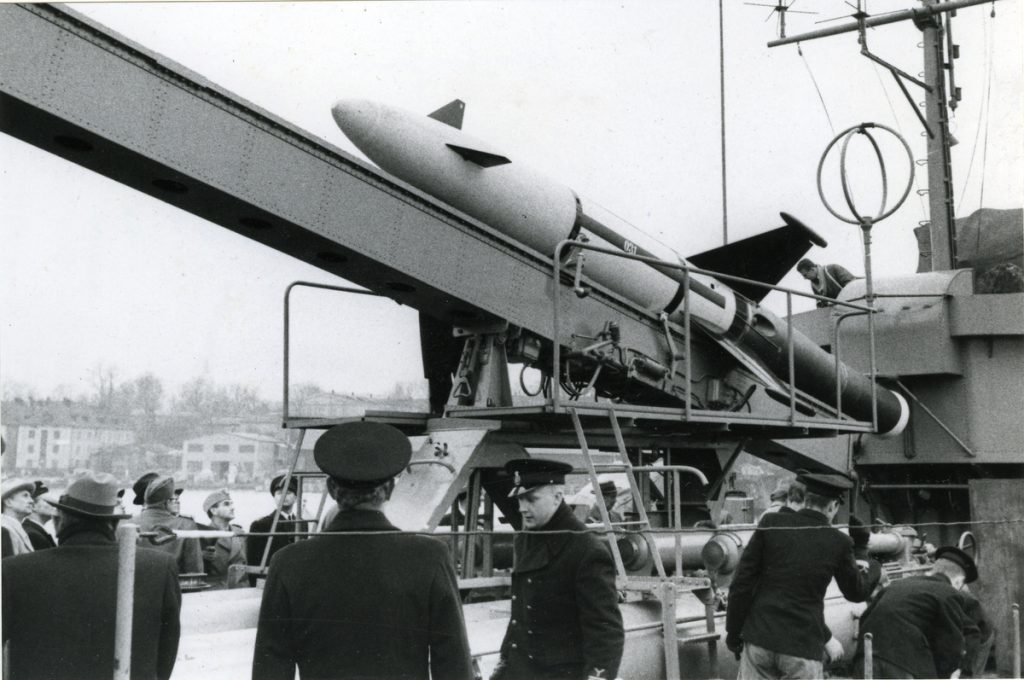
En Robot 315 på avfyringsramp ombord på Jagaren Halland. Foto: Sjöhistoriska museet
I början arbetade man efter tanken att lufttorpeden under den sista biten kvar till målet skulle dyka ned och färdas under vattnet, precis som vanliga torpeder. Med tiden övergav man den iden då det komplicerade det hela.
Robot 315 var inte längre en utveckling av V1, som de tidiga robotarna var, utan påminner i någon mån mer om dagens svenska sjömålsrobot, Robot 15. Istället för att påminna om ett flygplan med vingar var den försedd med två uppsättningar styrfenor, fyra fram och fyra bak, och de agerade som på en raket. På många sätt så var Robot 315 mycket närmare ett färdigt vapen även om man ännu inte fått fram målsökare och radarhöjdhållare.
Allt såg ut att gå bra men år 1957 så lades tillverkningen av Robot 315 ned av Robotbyrån. Prov fortsatte visserligen fram till 1959 men någon tillverkning var inte aktuell. Detta motiverades med att man behövde fokusera resurserna på flygvapnet Robot 304. Det var ett rationellt beslut men det är möjligt att rivalitet mellan försvarsgrenarna spelade in. Robotbyrån var trots allt en del av Flygförvaltningen och det är inte så märkligt ifall de ansåg att den egna försvarsgrenen, Flygvapnet, skulle prioriteras över allt annat.
Det betydde att Marinen stod med 12 års arbete som verkade helt bortkastat. Visserligen hade man nu en enorm kunskapsbank som skulle vara värdefull i framtiden, men det hade inte Marinen någon glädje där och då. Det visade också på att Flygvapnet nu tagit över rollen som den första försvarslinjen mot en fientlig invasion. Det är intressant att konstatera att fram till projektet Robot 315 lades ned så höll man mer eller mindre jämna steg med Sovjetunionens utveckling av roboten P-15 Termit, som i väst fick kodnamnet Styx. Denna robot kom i tjänst 1958-1960 och blev då den första fartygsburna sjömålsroboten. Men eftersom Marinen inte fick sin Robot 315 låg den nu efter sin tänkta motståndare och behovet av en fartygsburen sjömålsrobot var ännu mer akut än tidigare.